電池激光焊接檢測(極耳和密封針)
使用AI視覺檢測確保焊接位置正確、可重複且無缺陷
摘要(快速回答)
當眩光、旋轉和微米級公差破壞基於規則的視覺并減慢手動显微镜時,電池激光焊接檢測會失败。Overview.ai的OV80i視覺系統透過灵活的鏡頭和照明、相機內NVIDIA AI(PyTorch)和基於瀏覽器的訓練解决這個問題--讓團隊以生產速度可靠地檢測焊接位置和外观問題。
情况
在圆柱形和軟包電芯製造中,極耳或密封針透過激光焊接來封闭電解液注入點并創建電氣連接。焊接後,製造商必须驗證焊接位置(中心偏差)、焊接存在/形状和外观完整性--同時不減慢生產線。
問題
實際生產線是混亂的:
- 镜面金属和熱變色產生強烈眩光和低、變化的對比度。
- 微米級公差意味着一個像素的誤差可以改變决策。
- 姿態變化(小旋轉/偏移)移動表观目標并破壞固定ROI。
- 手動显微镜檢查缓慢且班次間不一致。
- 基於規則的工具(静態阈值/邊緣)随着照明和批次條件變化在漏檢和過度拒绝之間搖摆。
結果:非確定性QA、焊接站瓶颈和昂貴的返工。
為什麼傳統系統會漏檢
- 脆弱的阈值在反光焊接按钮、镍/铜極耳和變色方面掙扎。
- 沒有姿態歸一化意味着量測器在零件旋轉時會“漂移”。
- 光学控制不足使您解析度不足或與景深/眩光作斗爭。
- 缓慢的迭代周期(離線工具链/整合商)阻碍持續改進。

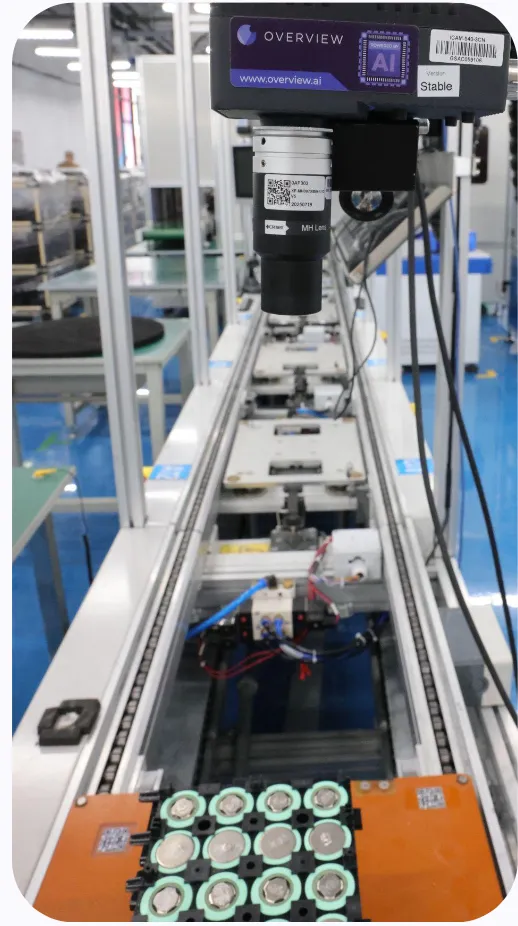
OV80i激光焊接位置檢測,顯示外部参考與焊接中心對齊
Overview.ai解決方案
當電池激光焊接檢測依赖於小特徵、稳定計量和可重複照明時,使用OV80i AI視覺系統。
灵活的鏡頭和照明
OV80i支援可互換鏡頭和常見工業照明器(例如環形、穹顶、背光、同轴)。您可以調整視場、工作距離和照明,而不是围繞固定相機調整工位。
內置NVIDIA GPU + PyTorch
OV80i在相機上運行現代深度模型;訓練、標注和測試在瀏覽器中進行--無需軟體安裝。您的團隊可以在新訓練技术可用時快速采用。
分割和分類配方
當需要幾何量測(例如焊接到中心距離)時選擇分割,快速OK/NG風格選擇分類,或在一次檢測中同時使用。
快速迭代(“Haystack”工作流)
軟體針對快速模型迭代和跨多條線部署進行了最佳化。
工業整合
數位I/O和工業以太網選項將决策連接到PLC和生產線控制;Node-RED實現自定義透過/失败逻辑和公差門。
“老實说,我沒想到這個相機能捕捉到這麼小的偏差,但它做到了。我也沒想到設定和訓練會這麼快速和简单。這項投資確實提高了我們的產品品質。”--生產主管
工作原理(典型配方)
1. 獲得正確的像素和對比度
選擇鏡頭以用焊接區域填充感測器;添加環形/穹顶/同轴照明以抑制熱點并顯示焊缝和参考幾何形状。
2. 歸一化姿態
在稳定的邊緣/地標上對齊,使檢測ROI即使在小旋轉的情况下也位於一致的坐標系中。
3. 使用AI分割進行量測
標注感興趣的特徵(例如外部中心特徵和焊接區域)。模型输出掩碼;系統計算中心到中心的偏差并與公差比较。如果需要,添加外观層以標記烧傷、針孔或飛溅類伪影。
4. 决策和行動
透過/失败和數值偏差傳送到PLC;Node-RED實現最終公差規則(例如警告帶、硬拒绝)。導出CSV用於QA趨勢分析。
您可以期待什麼
- 盡管有眩光和旋轉,檢測仍然稳定,因為量測基於對齊的語義掩碼--而不是单一阈值。
- 與显微镜檢查相比吞吐量更高;班次/批次間結果一致。
- 在PPAP/爬坡期間和跨工廠的更快迭代,得益於瀏覽器中的資料/配方更新和相機內訓練。
準備评估了吗?分享一小組影像(好的/臨界的/壞的),我們將返回鏡頭/照明建议、對齊計劃和您可以在生產線上驗證的入門分割配方。→ OV80i視覺系統
常見問題
OV80i在電池激光焊接上能檢測哪些缺陷?
焊接位置偏差(中心偏差)、缺失/尺寸不足的焊接、形状異常和與品質逃逸相關的外观問題--取决於您如何標記分割/分類配方。
OV80i與傳統視覺有何不同?
它將可互換的光学/照明與相機內NVIDIA AI和基於瀏覽器的訓練相結合,因此您可以針對金属最佳化成像并快速迭代模型,無需外部軟體。
我們可以實現自定義透過/失败逻辑吗?
是的--團隊通常使用Node-RED编碼公差(例如距離阈值)并將透過/失败+偏差發布到PLC/MES。