打开黑匣子:Haystack 如何為工業 AI 帶來透明度
在製造業的世界里,“黑匣子”是一種隐患。當自動化視覺系統將零件標記為“失败” (Fail) 時,品質工程師需要知道原因。如果沒有這種洞察力,調试模型就會變成透過试错法來浪費時間和資源的過程。
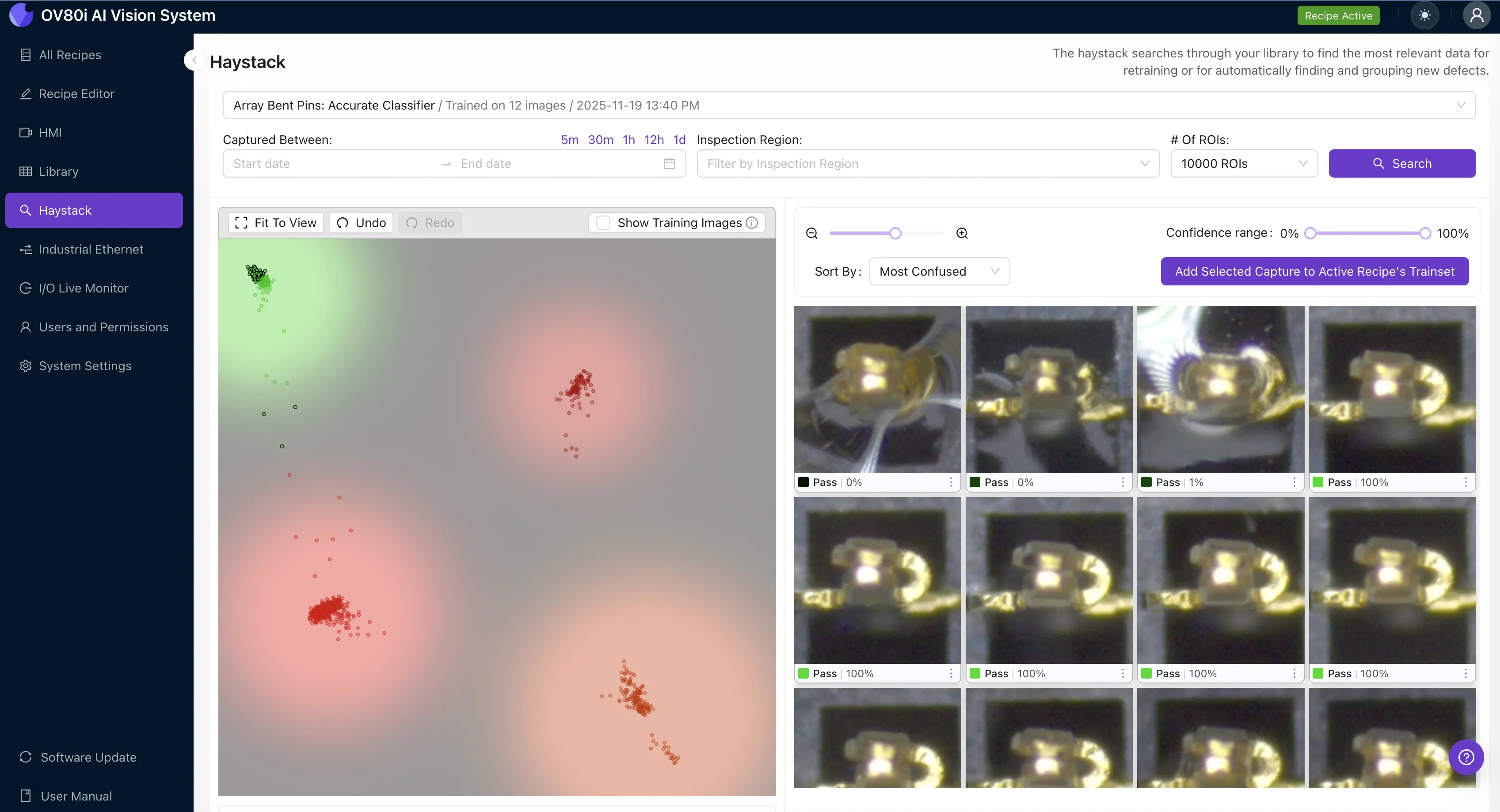
在 Overview,我們相信 AI 應該像工廠車間的任何其他工具一樣透明。這就是為什麼我們构建了 Haystack--一個將複雜的 AI 逻辑轉化為直观、交互式 2D 地圖的可視化框架。
什麼是 Haystack?
深度學習模型將影像視為高維數学,人類無法解释。Haystack 就像一個翻译器。它獲取這些複雜的資料點并將其投影到 2D “Haystack 空間”中,類似的影像聚集在一起。
把它想象成檢查資料的谷歌地圖。您看到的不再是數千張单獨的照片,而是生產品質的全景圖。“好”零件聚集在一個街區,而不同類型的缺陷--如劃痕、凹痕或缺失的組件--在地圖上形成自己獨特的“城鎮”。
工廠車間的類比
想象一下,您工廠的資料是數千張拍立得照片堆成的一個巨大、雜亂的堆。寻找特定缺陷就像大海捞針 (looking for a needle in a haystack)。
Haystack 就像一台高速分拣機,可以根據顯示的內容立即將這些照片整理成整齊的堆。然後它將這些堆放在一張巨大的桌子上,這樣您就可以一目了然地看到“合格”堆在哪里結束,“失败”堆在哪里开始--以及究竟有哪些照片位於两者之間的界線上。
停止猜測,开始調试
對於品質工程師來说,Haystack 是一個強大的诊斷工具。透過查看地圖,您可以立即識別:
- 混淆區域 (Confusion Regions): “合格”和“失败”影像重疊的區域。這確切地告诉您模型哪里不確定。
- 異常值 (Outliers): 位於“失败”集群中間的单個“合格”點通常揭示了標記错誤的影像或細微的新缺陷類型。
- 鲁棒性 (Robustness): 您可以看到模型如何處理光照變化或反射等變化,確保其在現實世界條件下保持稳定。
“套索” (Lasso) 工具:幾秒钟內訓練 AI
Haystack 最具創新性的功能之一是交互式套索工具。傳統上,重新訓練模型意味着手動整理數千張影像以找到 AI 難以處理的影像。
使用 Haystack,您只需在地圖上围繞一組不確定的影像画一個圆圈,然後一鍵將它們添加到訓練集中。這種“主動学习”工作流程允许工程師透過闭環持續改進,立即從檢測轉向行動。
以最少的資料證明效能
由於 Haystack 整合到 Overview 的高效能主干中,它不需要太多資料即可生效:
- 速度: 您可以在一分钟內訓練一個功能配方。
- 效率: 我們一些最複雜的應用--如檢查高壓線编织或軟座連接器--僅用 10 到 20 張影像就實現了 100% 的準確率。
- 恶劣環境: 當與我們的 OV20i 硬體搭配使用時,Haystack 使用“光度模式”去除闪亮表面的眩光,使得即使是最小的劃痕也能在地圖上清晰可見。
常見問題 (FAQ)
訓練模型并生成功能的 Haystack 地圖需要多少影像?
與需要數千個樣本的傳統視覺系統不同,Overview 的深度學習架构針對小資料集進行了最佳化,通常只需要 4 到 20 張影像即可實現高精度。'快速分類器' (Fast Classifier) 選項允许在短短 45 秒內快速生成 Haystack 地圖和决策邊界,使工程師能够幾乎立即驗證新配方。這種高效性是由任務感知投影頭驅動的,即使在資料最少的情况下也能最大化類可分性。
Haystack 如何處理高反射表面或不稳定的工廠照明?
Haystack 是專為“令人畏惧”的環境(例如涉及闪亮或反射物體的環境)設計的硬體-軟體生態系統的一部分。該系統利用 OV20i 硬體上的光度模式消除眩光并揭示細微缺陷,如劃痕或凹坑,否則這些缺陷是不可見的。由於基於 RBF 的基础分類對變化具有鲁棒性,因此即使環境照明或操作員處理發生變化,生成的 Haystack 地圖仍保持稳定,確保决策邊界在實際生產條件下不會不規律地移動。
Haystack 可以整合到現有的工廠工作流程和控制系統中吗?
是的,Haystack 旨在具有可操作性,而不僅僅是诊斷功能。該系統透過無代碼工作流构建器與工廠生態系統無缝整合,可以在檢測到缺陷的瞬間触發即時操作--例如向 PLC 傳送停止生產線的信號、更新 MES 或傳送 Slack 警報。此外,該介面包括一個主動学习套索工具,允许品質工程師直接從 2D 可視化中選擇不確定的樣本,并立即將其排隊等待重新訓練,從而闭環持續的過程改進。